강의 필기
이것은 Analytical Mechanics 강의를 듣고 적은 필기입니다.
정리가 안 되어 있고, 개인적인 생각과 풀이가 섞여 있을 수도 있습니다.
지난 강의
AM lecture note - Lagrangian for fields
오늘의 핵심
정리를 끝내고 나서 핵심을 이곳에 적기.
AI한테 시켜도 되는데 추천은 안 함.
필기 내용
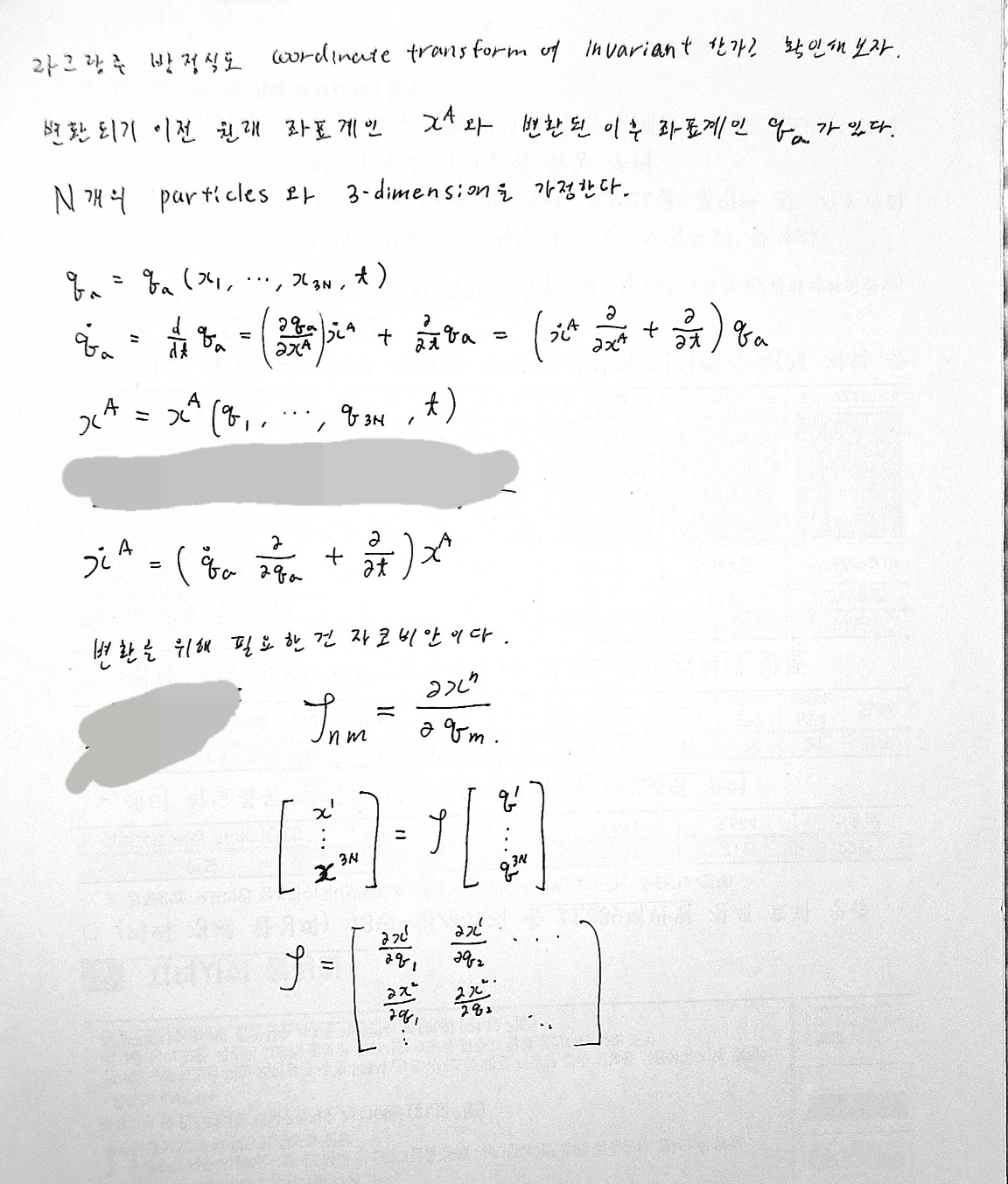
라그랑주 방정식도 coordinate transform에 invariant 한가?
변환 되기 이전 좌표인
반대로
변환을 취하기 위해 필요한 건 자코비안이다.
행렬로 쓰면:
라그랑주 방정식이 변환에 invariant 라면
이를 증명하려면,
여기서
따라서:
따라서:
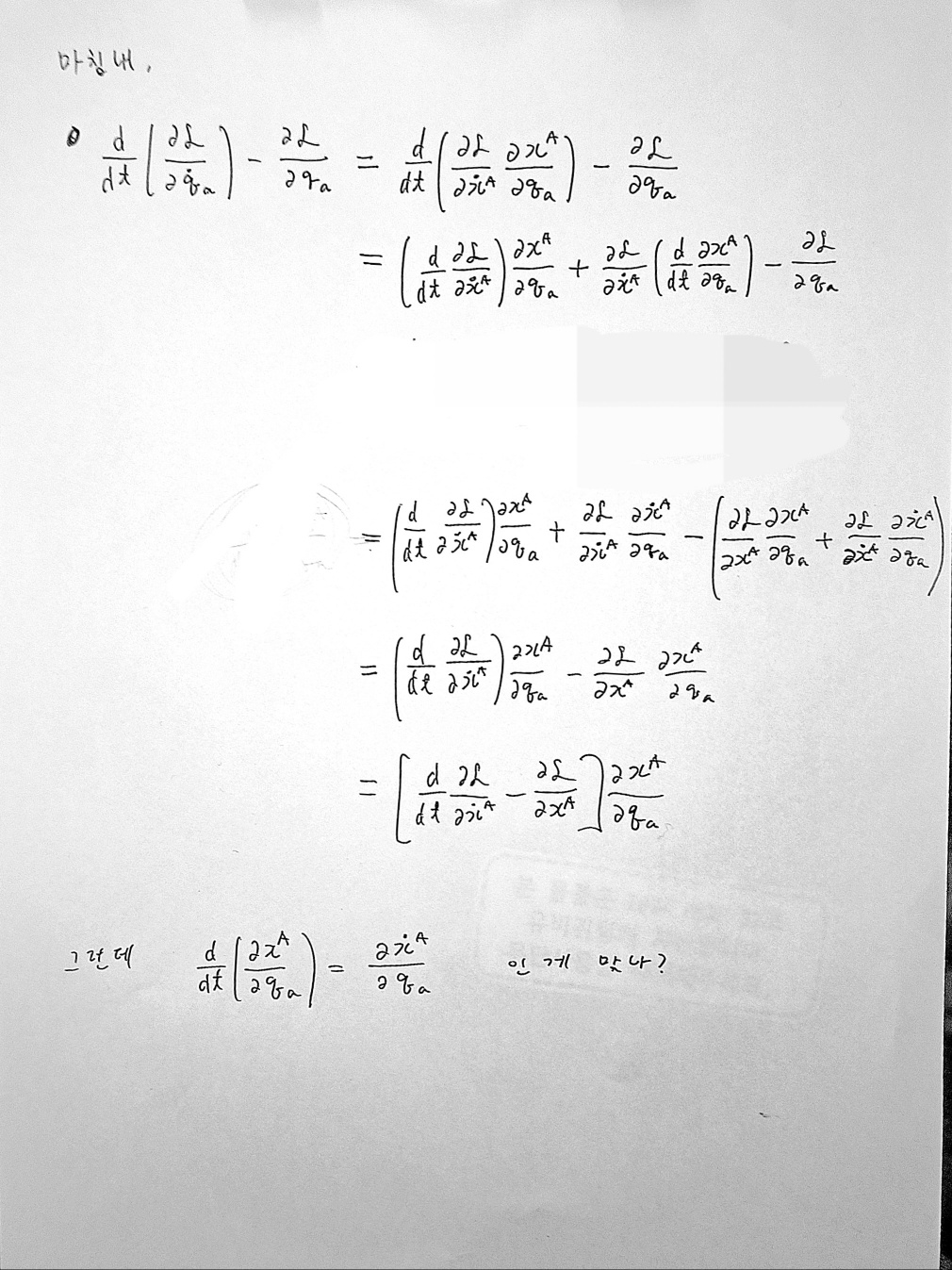
마침내, 불변성 증명
자체 풀이
아래 유도는 수업에서 생략된 부분을 직접 계산한 것.
두 번째와 네 번째 항이 상쇄되어:
이 괄호 안이 바로
결론: 라그랑주 방정식은 좌표 변환에 대해 불변이다.
좌표변환된 라그랑주 방정식을 얻고 싶다면 바로 자코비 행렬을 이용하면 된다.
변환된 좌표계에서 라그랑지안 역학이 사용되는 예
Tong 강의록에 그대로 있다.
중간 풀이 과정을 추가한 내용을 별도 노트에 정리했다.
Lagrangian in Rotating Coordinate, Coriolis force
궁금한 내용
증명 과정에서 이 관계를 사용했는데, 맞는가?
AI의 보충 설명
이건 “
이를
한편
두 식이 완전히 같다.
연관 학습 노트
References
Tong의 강의록
2 The Lagrangian Formalism.pdf
다음 강의
AM lecture note - Holonomic constraints
필기 원본 이미지